Hello! My name is Anton. I’m a researcher in autonomous robotics with a particular interest in computer vision (3D point cloud semantic segmentation and detection) and deep learning for robust 3D perception. I am also broadly interested in SLAM and building reconstraction.
Recently I finished my job as a Lead Computer Vision Engineer for the AI Lab at Innopolis University in Russia. Before my current role, I worked as a Data Scientist for the ML Matching Team at OZON Technology in Russia. Prior to that, I served as a Middle Software Developer for the Localization and Mapping (SLAM) team) within the Self-Driving Group at the same company. In that role, I focused on developing the algorithms that underlie SLAM.
I received my Master of Science in Space and Engineering Systems at Skolkovo Institute of Science and Technology (Skoltech) in June 2020 — including a six-month research visit at the Robotics Institute at Carnegie Mellon University.
My Master’s research work was based at Biorobotics Lab at the Robotics Institute of Carnegie Mellon University under the supervision of Professor Howie Choset — related to the development of a new 3D Place Recognition framework in 3D LiDAR-based SLAM algorithm with an orientation-invariant property.
Recent news
Recently… <!– * [Apr 2023] The submission for the two challenges in the “Computer Vision in the Built Environment” CVPR 2023 Workshop is now open until June 5th. For more details see here
- [Apr 2022] Co-organizer (Development Team) of 2nd Workshop and Challenge on Computer vision in the build environment for the design, construction, and operation of buildings segmentations. Held in conjunction with the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2022, New Orleans, Louisiana, USA, June 2022. –>
- [Dec 2021] Co-authored work titled PSE-Match: A Viewpoint-free Place Recognition Method with Parallel Semantic Embedding. Research has been accepted for publication in IEEE Transactions on Intelligent Transportation Systems journal (T-ITS 2021) (Official Page).
- [Oct 2021]Co-authored work titled Fast Sequence-matching Enhanced orientation-invariant 3D Place Recognition. Research has been accepted for publication in IEEE Transactions on Industrial Electronics journal (TIE 2021) (Official Page).
- [Jun 2020] Co-authored work titled SeqSphereVLAD: Sequence Matching Enhanced Orientation-Invariant Place Recognition. Research has been accepted for publication and presented at IROS 2020
(Official Page, Video). - Co-authored work titled LocoGear: Locomotion Analysis of Robotic Landing Gear for Multicopters. Research has been published in J-MASS-journal (Official Page, Video).
Research Highlights
3D Place recognition with parallel semantic embedding
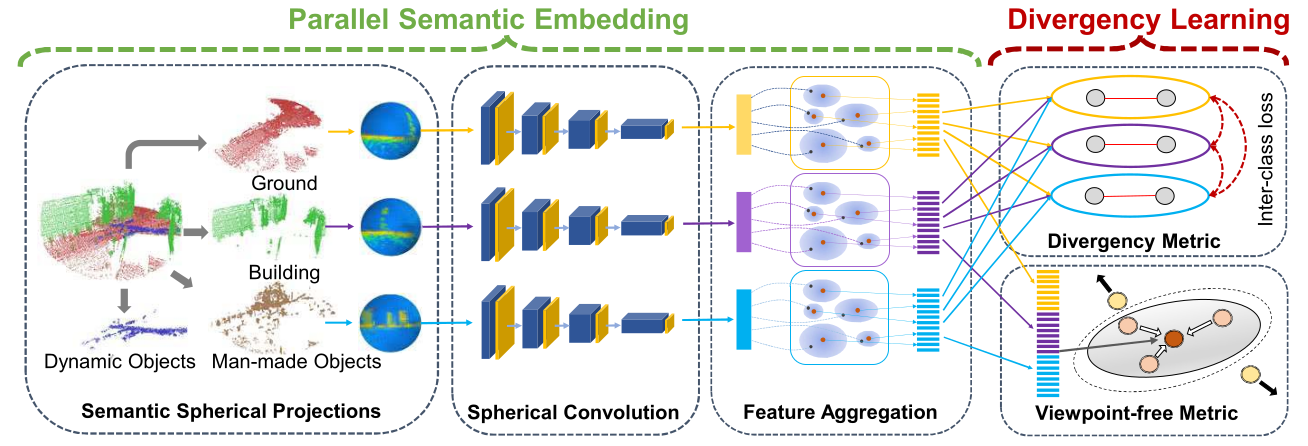
To solve a scene divergence under the interference of dynamic environments, effective perception of observation and object layout variance from different viewpoints, my group developed a PSE-Match, a viewpoint-free place ecognition method based on parallel semantic analysis of isolated semantic attributes from 3D point-cloud models.
Research has been published in IEEE Transactions on Intelligent Transportation Systems journal (T-ITS 2021).
3D Place recognition with Fast Sequence-matching
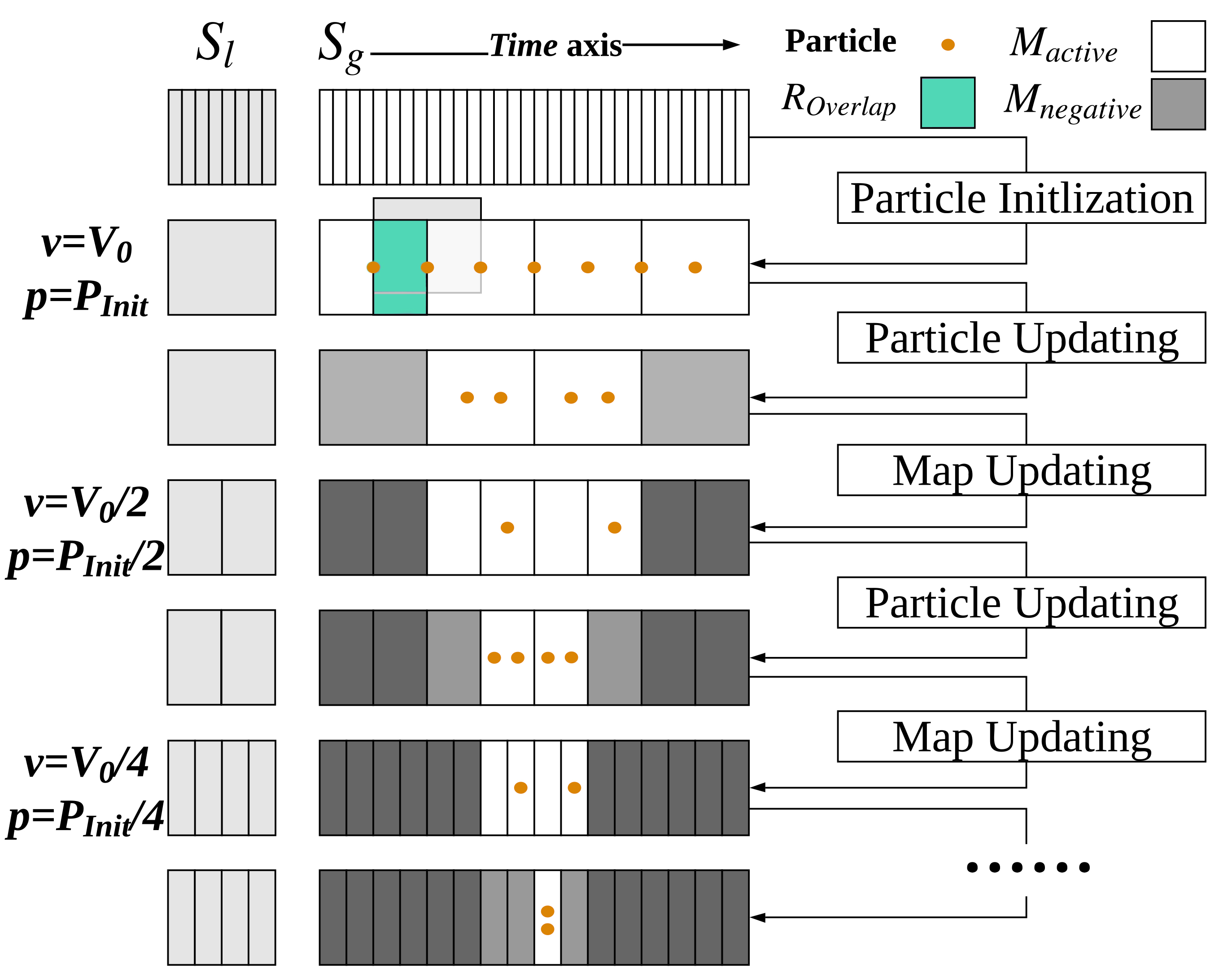
To improve sequence matching efficiency in 3D Place recognition, we designed a coarse-to-fine fast sequence matching mechanism to balance the matching efficiency and accuracy. Research has been published in IEEE Transactions on Industrial Electronics journal (TIE 2021).
3D Place recognition with SeqSphereVLAD
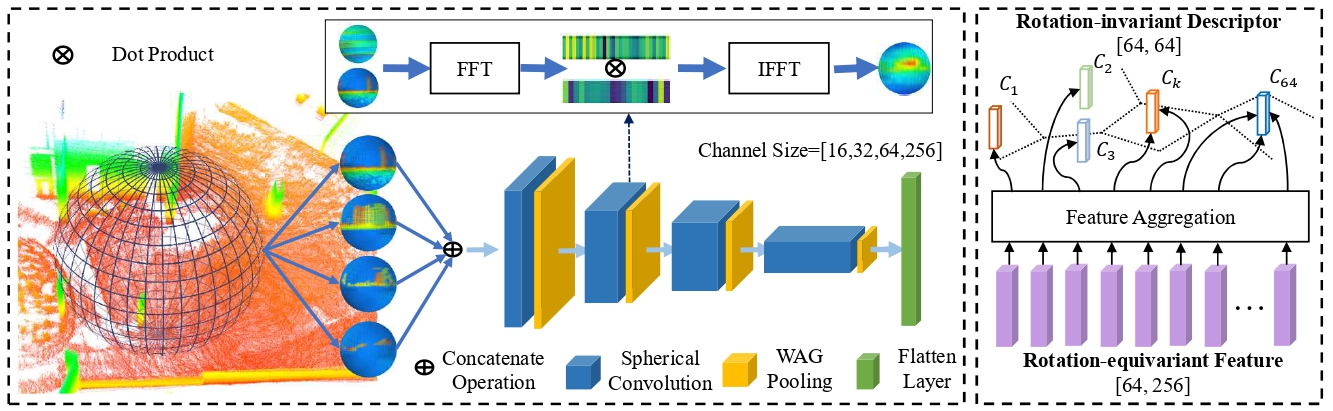
SeqSphereVLAD is a deep learing approach to achieving accurate and robust 3D Place recognition (used to build large scale 3D maps) using point-clouds (3D LiDAR data) based on a viewpoint-invariant descriptor. This work has been published in the International Conference on Intelligent Robots and Systems (IROS 2020), Las Vegas, NV.
LocoGear: Locomotion Analysis
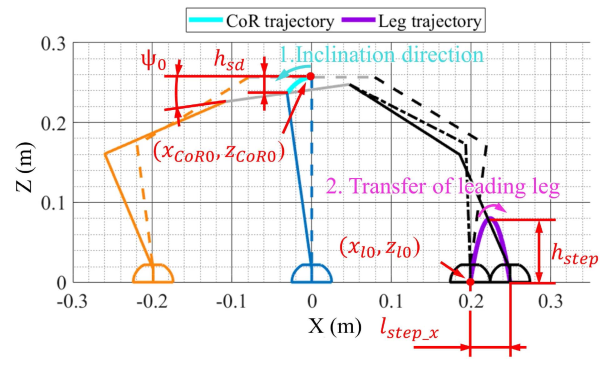
LocoGear, a novel algorithm for locomotion with UAV equipped robotic landing gear.
Research has been published in IEEE Journal on Miniaturization for Air and Space Systems (J-MASS 2020).
Events
June, 2021 - It is my last day as an engineer in the Localization and Mapping team at the Autonomous Transportation Systems Lab of Innopolis University in Russia! There, I worked on creating a SLAM and Perception algorithms for the first self-driving truck in Russia and the first self-driving car to pass a practical driver’s license exam.


November, 2020 - I moved to High Tech Innopolis city, Russia! Aspiring to working on my research in SLAM team at Autonomous Transportation Systems Lab of Innopolis University!


March, 2020 - Celebration after successful six-month research at Carnegie Mellon University!


August, 2019 - I moved to Pittsburgh, PA! Very excited and looking forward to working on my research projects at the Robotics Institute of CMU!
June, 2019 It was this year that Russia’s Reset team won 2nd place for the first time in history at World Finals of the robotics competition “Eurobot OPEN” (France, 2019). When we won the semifinals, the awazing feeling full of pride and accomplishment, you can not help but think, “man, we did it, we finally did it after all these years”. It was such an accomplishment for me and my teammates to be the first that made Russian robotics history!


April, 2019 - My Reset team won the nationals of “Eurobot OPEN”, and we moved on to international stage. (Moscow, Russia )

January, 2019 - During my independent studies period at Skoltech University, I attended Boeing sponsored Pilot School in Moscow, Russia. For several weeks, I completed dozens of hours behind a flight simulator, with the ultimate goal of becoming the the high-scoring few that can finish the term with a chance to fly behind controls of a real flight deck.


December, 2018 - My team designed and launched from gorund a payload (CubeSat) to about 24 km into the atmosphere, with a porpose to research various characteristics of solar cells, as part of Systems Engineering cource at Skoltech.


August, 2018 - I successfully presented my summer research project at Helmholtz-Zentrum Berlin für Materialien und Energie (HZB) in Berlin, Germany. I also got a chance to meet the Chancellor of Germany Angela Dorothea Merkel.